Инфракрасные (ИК, IR) датчики обычно используются для измерения расстояний, но их также можно использовать и для обнаружения объектов. Подключив несколько ИК-датчиков к Arduino, мы можете создать охранную сигнализацию.
Обзор
Инфракрасные (ИК, IR) датчики обычно используются для измерения расстояний, но их также можно использовать и для обнаружения объектов. ИК-датчики состоят из инфракрасного передатчика и инфракрасного приемника. Передатчик выдает импульсы инфракрасного излучения в то время, как приемник детектирует любые отражения. Если приемник обнаруживает отражение, это означает, что перед датчиком на некотором расстоянии есть какой-то объект. Если отражения нет, нет и объекта.
IR-датчик, который мы будем использовать в данном проекте, обнаруживает отражение в определенном диапазоне. Эти датчики имеют небольшое линейное устройство с зарядовой связью (CCD), которое детектирует угол, с которым ИК-излучение возвращается к датчику. Как показано на рисунке ниже, датчик передает инфракрасный импульс в пространство, а когда перед датчиком появляется объект, импульс отражается обратно к датчику под углом, пропорциональным расстоянию между объектом и датчиком. Приемник датчика детектирует и выводит угол, и, используя это значение, вы можете рассчитать расстояние.
Подключив пару ИК-датчиков к Arduino, мы можем сделать простую охранную сигнализацию. Мы установим датчики на дверной косяк, и, правильно выровняв датчики, мы сможем обнаружить, когда кто-то проходит через дверь. Когда это произойдет, сигнал на выходе ИК-датчика изменится, а мы обнаружим это изменение, постоянно считывая выходной сигнал датчиков с помощью Arduino. В данном примере мы знаем, что объект проходит через дверь, когда показание на выходе ИК-датчика превышает 400. Когда это произойдет, Arduino включит сигнал тревоги. Чтобы сбросить срабатывание сигнализации, пользователь может нажать на кнопку.
Комплектующие
- 2 x ИК-датчик расстояния;
- 1 x Arduino Mega 2560;
- 1 x зуммер;
- 1 x кнопка;
- 1 x резистор 470 Ом;
- 1 x NPN транзистор;
- перемычки.
Схема соединений
Схема для данного проекта показана на рисунке ниже. Выходы двух ИК-датчиков подключены к выводам A0 и A1 . Два других вывода подключены к выводам 5V и GND. 12-вольтовый зуммер подключен к выводу 3 через транзистор, а кнопка, используемая для отключения сигнализации, подключена к выводу 4.

На приведенной ниже фотографии показано, как мы наклеили датчики на дверной косяк для этого эксперимента. Разумеется, в случае постоянного использования вы установили бы датчики по-другому.

Установка
- Подключите выводы 5V и GND платы Arduino к выводам питания и GND датчиков. Вы также можете подавать на них внешнее питание.
- Подключите выходные выводы датчиков к выводам A0 и A1 платы Arduino.
- Подключите вывод 3 Arduino к базе транзистора через резистор 1 кОм.
- Подайте напряжение 12 В на коллектор транзистора.
- Подключите положительный вывод 12-вольтового зуммера к эмиттеру, а отрицательный - к шине земли.
- Подключите вывод 4 к выводу 5V через кнопку. В целях безопасности, во избежание протекания большого тока это всегда лучше делать через дополнительный небольшой резистор.
- Подключите плату Arduino к компьютеру через USB кабель и загрузите программу в микроконтроллер, используя Arduino IDE.
- Подайте на плату Arduino питание, используя блок питания, аккумулятор или USB кабель/
Код
const int buzzer=3; // вывод 3 – это выход на зуммер const int pushbutton=4; // вывод 4 – это вход для кнопки void setup() { pinMode(buzzer,OUTPUT); // настроить вывод 3 на выход pinMode(pushbutton,INPUT); // настроить вывод 4 на вход } void loop() { // прочитать выходной сигнал обоих датчиков и сравнить результат с пороговым значением int sensor1_value = analogRead(A0); int sensor2_value = analogRead(A1); if (sensor1_value > 400 || sensor2_value > 400) { while(true) { digitalWrite(buzzer,HIGH); // включить сигнал тревоги if(digitalRead(pushbutton) == HIGH) break; } } else { digitalWrite(buzzer,LOW); // выключить сигнал тревоги } }Видео
Данный проект касается разработки и усовершенствования системы для предотвращения/контроля любых попыток проникновения воров. Разработанное охранное устройство использует встроенную систему (включает аппаратный микроконтроллер с использованием открытого программного кода и gsm модем) на базе технологии GSM (Глобальная система подвижной связи).
Охранное устройство может быть установлено в доме. Интерфейсный датчик охранной сигнализации также подсоединен к охранной системе на базе контроллера.
При попытке проникновения система передает предупреждающее сообщение (например, sms) владельцу на мобильный телефон или на любой заранее сконфигурированный мобильный телефон для дальнейшей обработки.

Охранная система состоит из микроконтроллера Arduino Uno и стандартного модема SIM900A на базе GSM/GPRS. Вся система может питаться от любого источника питания/батареи 12В 2A.
Ниже показана схема охранной системы на базе Arduino.
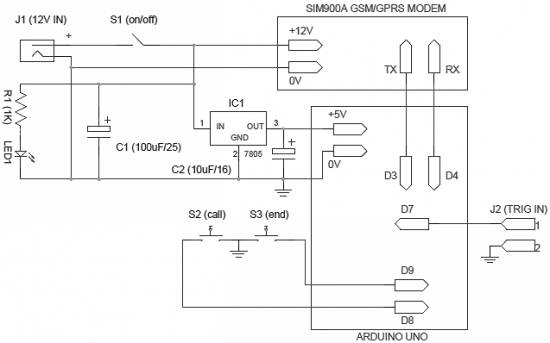
Работа системы очень проста и не требует разъяснений. Когда на систему подается питание, она переходит в дежурный режим. Когда выводы коннектора J2 закорочены, заранее запрограммированное предупреждающее сообщение передается на требуемый мобильный номер. Вы можете подсоединить любой детектор обнаружения проникновения (такой как световое защитное приспособление или датчик движения) к входному коннектору J2. Заметьте, что активный-низкий (L) сигнал на выводе 1 коннектора J2 активирует срабатывание охранной сигнализации.
Более того, в систему добавлено опциональное приспособление “вызов – тревога”. Оно активирует телефонный звонок, когда пользователь нажмет кнопку S2 (или когда другой электронный блок инициирует сигнализацию). После нажатия кнопки “call” (S2), вызов можно отменить, нажав другую кнопку S3 – кнопку “end”. Данная опция может использоваться для подачи сигнала тревоги в случае “пропущенного звонка” в случае проникновения.
Схема очень гибкая, поэтому может использовать любой SIM900A модем (и, конечно, плату Arduino Uno). Внимательно прочтите документацию на модем до начала сборки. Это позволит облегчить и сделать приятным процесс изготовления системы.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| Плата Arduino | Arduino Uno | 1 | В блокнот | |||
| GSM/GPRS-модем | SIM900A | 1 | В блокнот | |||
| IC1 | Линейный регулятор | LM7805 | 1 | В блокнот | ||
| C1 | 100мкФ 25В | 1 | В блокнот | |||
| C2 | Электролитический конденсатор | 10мкФ 16В | 1 | В блокнот | ||
| R1 | Резистор | 1 кОм | 1 | В блокнот | ||
| LED1 | Светодиод | 1 | В блокнот | |||
| S1 | Кнопка | С фиксацией | 1 |
Доброе время суток 🙂 Сегодня поговорим о сигнализации. На рынке услуг полно фирм, организацией, которые занимаются установкой и обслуживанием охранных систем. Эти фирмы предлагают покупателю широкий выбор сигнализацией. Однако их стоимость далеко не копеечная. Но что же делать человеку, у которого не так уж и много личных средств, что можно потратить на охранную сигнализацию? Думаю, вывод напрашивается сам собой – сделать сигнализацию своими руками . В этой статье приведён пример того, как можно сделать свою собственную кодовую охранную систему используя плату Arduino uno и несколько магнитных датчиков.
Систему можно дезактивировать вводом пароля с клавиатуры и нажатием кнопки ‘* ‘. Если хотите изменить текущий пароль, можете сделать это нажав на клавишу ‘B ‘, а если хотите пропустить или прервать операцию, можете сделать это нажав на клавишу ‘#’. В системе есть зуммер для воспроизведения различных звуков при выполнении той либо иной операции.
Активируется система нажатием кнопки ‘A’. Система даёт 10 секунд на то, чтобы покинуть помещение. После прошествии 10 секунд сигнализация будет активирована. Количество магнитных датчиков будет зависит от вашего собственного желания. В проекте задействованы 3 датчика (для двух окон и двери). Когда окно открывается система активируется, и включается сигнал тревоги идущий с зуммера. Систему можно дезактивировать путем набора пароля. Когда открывается дверь, сигнализация даёт вошедшему 20 секунд для ввода пароля. Система использует ультразвуковой датчик, что может обнаруживать движение.
Видео работы устройства
Поделка изготовлена в ознакомительных/обучающих целях. Если хотите использовать её у себя дома, будет необходимо её доработать. Заключить управляющий блок в металлический корпус и обезопасить линию питания от возможного повреждения.
Давайте начинать!
Шаг 1: Что нам будет нужно

- плата Arduino uno;
- высококонтрастный LCD дисплей 16×2;
- клавиатура 4×4;
- 10~20кОм потенциометр;
- 3 магнитных датчика (они же герконы);
- 3 2-х пиновых винтовых клеммы;
- HC-SR04 ультразвуковой датчик;
Если вы хотите собрать систему без использования Arduino, вам также потребуется следующее:
- DIP разъём для atmega328 + микроконтроллер atmega328;
- 16MГц кварцевый резонатор;
- 2 шт. 22pF керамических, 2 шт. 0.22uF электролитических конденсатора;
- 1 шт. 10кОм резистор;
- гнездо под питание (DC power jack);
- макетная плата;
- 5В блок питания;
И одна коробка, чтобы всё это упаковать!
Инструменты:
- Что-то, чем можно разрезать пластиковую коробку;
- Термоклеевой пистолет;
- Дрель/шуруповерт.
Шаг 2: Схема сигнализации

Схема соединения довольно простая.
Небольшое уточнение:
Высококонтрастный LCD:
- Pin1 — Vdd к GND;
- Pin2 — Vss к 5В;
- Pin3 — Vo (к центральному выводу потенциометра);
- Pin4 — RS к 8 выводу Arduino;
- Pin5 — RW к GND;
- Pin6 — EN к 7 выводу Arduino;
- Pin11 — D4 к 6 выводу Arduino;
- Pin12 — D5 к 5 выводу Arduino;
- Pin13 — D6 к 4 выводу Arduino;
- Pin14 — D7 к 3 выводу Arduino;
- Pin15 — Vee (к правому или левому выводу потенциометра) .
Клавиатура 4×4:
От левого к правому:
- Pin1 к A5 выводу Arduino;
- Pin2 к A4 выводу Arduino;
- Pin3 к A3 выводу Arduino;
- Pin4 к A2 выводу Arduino;
- Pin5 к 13 выводу Arduino;
- Pin6 к 12 выводу Arduino;
- Pin7 к 11 выводу Arduino;
- Pin8 к 10 выводу Arduino.
Шаг 3: Прошивка

В шаге представлен код, что используется встроенным !
Скачайте плагин codebender. Нажмите на кнопку «Run» в Arduino и прошейте свою плату этой программой. На этом всё. Вы только что запрограммировали Arduino! Если хотите внести изменения в код, нажмите кнопку»Edit».
Примечание: Если вы не будете использовать Codebender IDE для программирования платы Arduino, вам будет нужно установить дополнительные библиотеки в Arduino IDE.
Шаг 4: Изготавливаем собственную управляющую плату

После того, как удачно собрали и протестировали новый проект на базе Arduino uno, можете начать изготовление собственной платы.
Несколько советов, для более успешного завершения затеянного:

- 10кОм резистор должен монтироваться между 1 (reset) и 7 (Vcc) выводами микроконтроллера Atmega328.
- 16MГц кварцевый резонатор должен подсоединятся к выводам 9 и 10, отмеченными, как XTAL1 и XTAL2
- Соедините каждый вывод резонатора с 22pF конденсаторами. Свободные выводы конденсаторов заведите на 8 вывод (GND) микроконтроллера.
- Не забудьте соединить вторую линию питания ATmega328 с блоком питания, выводы 20-Vcc и 22-GND.
- Дополнительную информацию по выводам микроконтроллера можете найти на втором изображении.
- Если планируете использовать блок питания с напряжением выше 6В, необходимо воспользоваться линейный регулятором LM7805 и двумя 0.22uF электролитическими конденсаторами, которые следует смонтировать на входе и выходе регулятора. Это важно! Не подавайте больше, чем 6В на плату!!! В противном случае вы спалите свой микроконтроллер Atmega и LCD дисплей.
Шаг 5: Размещаем схему в корпусе

Весна, как известно, сопровождается всевозможными обострениями и вот главное «обострение» повылазило из своих нор на улицу, дабы присвоить себе то, что ему не принадлежит. А значит тема защиты своего имущества становится, как никогда, актуальной.
На сайте уже есть несколько обзоров на самодельные - . Они конечно функциональны, однако у всех имеется общая особенность - зависимость от розетки. Если с недвижимостью, где уже подведено электричество, это не проблема, то как быть с имуществом, где розетка далеко или окрестности вовсе обесточены? Я решил пойти другим путём - собрать долгоживущий, максимально простой и независимый от сетевого питания девайс, который будет всё время отсыпаться, а при проникновении грабителей, запускаться и отзваниваться хозяину на телефон, сигнализируя простым звонком о тревоге.
Предметы обзора
Покупные:1. Макетная плата односторонняя 5x7 см: гетинакс - или стеклотекстолит
*- стеклотекстолит намного качественнее гетинакса.
2. Модуль Neoway M590 - , с антенной на текстолите -
3. Arduino Pro Mini «RobotDyn» ATmega168PA 8MHz 3.3V -
4. Плата контроля заряда-разряда лития -
Добытые на развалах цивилизации:
1.
Стойки для платы, выпиленные из корпусов приборов - 6шт.
2.
Аккумулятор литиевый плоский 1300mAh
3.
Скобы, используемые для фиксации кабеля к стене
4.
Ластик канцелярский
5.
Медная проволока толщиной 1.5мм
6.
Приборный корпус с местного радиорынка - 1.5$
7.
Пара светодиодов разного цвета (взял с VHS-плеера)
8.
Антенна и кнопка с колпачком (взял с Wi-Fi роутера)
9.
4-х контактный клеммник (взял со с диммера)
10.
Разъём питания (взял со старого зарядника для 18650)
11.
Разъём 6-пиновый (взял с DVD-привода)
12.
Жестяная банка (из-под кофе например)
Arduino Pro Mini «RobotDyn» Atmega 168PA 3.3V 8MHz
Технические характеристики:Микроконтроллер: ATmega168PA
Рабочее напряжение прямое: .8 - 5.5 В
Рабочее напряжение через стабилизатор LE33: 3.3 В или 5 В (в зависимости от модели)
Рабочая температура: -40°C… 105°C
Входное напряжение: 3.35-12 В (модель 3.3 В) или 5-12 В (модель 5 В)
Цифровые Входы/Выходы: 14 (6 из которых могут использоваться как выходы ШИМ: 3, 5, 6, 9, 10, и 11)
Аналоговые входы: 6
Таймеры-счётчики: два 8-битных и один 16-битный
Режимы энергосбережения: 6
Постоянный ток через вход/выход: 40 мА
Флеш-память: 16 Кб (2 используются для загрузчика)
ОЗУ: 1 Кб
EEPROM: 512 байт
Ресурс записи/стирания памяти: 10,000 Flash/100,000 EEPROM
Тактовая частота: 8 МГц (модель 3.3 В) или 16 МГц (модель 5 В)
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK)
I2C: A4 (SDA) и A5 (SCL)
UART TTL: 0 (RX) и 1 (TX)
Даташит:
Выбор пал на данную атмегу совершенно случайно. на одном форуме, где обсуждались энергоэкономичные проекты, в комментариях попался совет использовать именно 168-ю атмегу.
Однако пришлось повозится, чтобы такую плату отыскать, поскольку сплошь и рядом все лоты были завалены 328-ми атмегами на частоте 16МГц, работающими от 5В. Для моего проекта такие характеристики были избыточны и неудобны уже изначально, поиски усложнились.
В итоге набрёл на 3.3-вольтовую версию Pro Mini на Atmega 168PA на eBay, причём не простую китайскую, а под брендом RobotDyn от российского разработчика. Да, у меня тоже сначала, как и у вас, возникло зерно сомнения. А зря. Когда проект уже был собран, а AliExpress ввёл обязательную платную доставку для дешёвых товаров (после которой посылки стали теряться гораздо чаще), тo позже заказал обычную Pro Mini Atmega168 (без PA) 3.3V 8MHz. Я немного экспериментировал с режимами энергосбережения c обеими платами, прошивая в каждую специальный скетч, погружающий микроконтроллер в максимальный режим энергосбережения и вот что вышло:
1) Arduino Pro Mini «RobotDyn»:
~250мкА
2) Arduino Pro Mini «NoName»:
при подаче питания на стабилизатор напряжения (вывод RAW) и выпаянном светодиоде потребляемый ток составил ~3.92мА


- как вы поняли, разница в энергопотреблении почти в 16 раз, всё потому, что в NoName"мовской Pro Mini используется связка Atmega168+ , из которых сам МК ест всего 20мкА
тока (это я проверил отдельно), всё остальное обжорство приходится на линейный преобразователь напряжения AMS1117 - даташит это только подтверждает:
В случае с платой от RobotDyn связка уже несколько иная - это Atmega168PA+ - здесь применён уже другой LDO-стабилизатор, чьи характеристики в плане энергосбережения оказались более приятными:
Выпаивать я его не стал, поэтому не могу сказать, сколько Atmega168PA потребляет тока в чистом виде. В данном случае мне хватило ~250мкА
при питании от нокиевского литиевого аккумулятора. Однако если выпаять AMS1117 c NoName"мовской платы, то ATmega168-я обычная, в чистом виде, как я и сказал выше, потребляет 20мкА
.
Светодиоды, стоящие по питанию можно сковырнуть чем-то острым. Это не проблема. Стабилизатор выпаивал феном. Однако не у каждого есть фен и навыки работы с ним, поэтому оба вышеприведённых варианта имеют право на существование.
Модуль Neoway M590E
Технические характеристики:Частоты: EGSM900/DCS1800 Dual-band, or GSM850/1900 or Quad-band
Чувствительность: -107dBm
Максимальная мощность передачи: EGSM900 Class4(2W), DCS1800 Class1(1W)
Пиковый ток: 2А
Рабочий ток: 210мА
Ток в спящем режиме: 2.5мА
Рабочая температура: -40°C… +85°C
Рабочее напряжение: 3.3V… 4.5V (рекомендуемое 3.9V)
Протоколы: GSM/GPRS Phase2/2+, TCP/IP, FTP, UDP etc.
Интернет: GPRS CLASS 10
Даташит:
Самый дешёвый GSM-модуль, что можно найти на рынке, как правило б/у, выпаянный не всегда ловкими китайскими руками с оборудования. Почему не всегда ловкими? Да всё из-за выпайки феном - нередко людям эти модули приходят с закороченным плюсом и минусом, что является одной из причин их неработоспособности. Поэтому первым делом необходимо прозванивать контакты питания на короткое замыкание.
Примечание. Отдельный немаловажный, на мой взгляд, момент хотелось бы отметить - эти модули могут приходить с круглым коаксиальным разъёмом под антенну, что позволяет отдельно заказать антеннку посерьёзнее и без плясок с бубном её к модулю подключить. А могут приходить и без этого разъёма. Это если говорить о самых дешёвых наборах. Если не хочется уповать на счастливую случайность, то есть наборы чуть подороже, где этот разъём присутствует + в комплекте идёт внешняя антенна на текстолитовой плате.
Этот модуль к тому же ещё и капризен до питания, поскольку в пике он потребляет до 2А тока, а диод, идущий в комплекте, вроде как задуман для понижения напряжения с 5В (почему и написано на самой плате 5В) до 4.2В, но судя по жалобам народа, он создаёт больше хлопот, чем пользы.
Допустим этот модуль у вас уже собран, а вместо диода впаяна перемычка, поскольку мы не собираемся подавать на него напряжение 5В, а будем питать его напрямую от литиевого аккумулятора, что укладывается в пределы допустимых напряжений 3.3-4.2В.
Надо будет его как-то ещё подключить к компьютеру, и проверить на работоспособность. Для этого случая лучше заранее прикупить себе - посредством него мы будем общаться с модулем и платами Arduino по последовательному интерфейсу UART (USART).
Подключение показано ниже на картинке (нарисовал, как умею):
TX модема >>> RX конвертера
RX модема <<< TX конвертера
Плюс аккумулятора - Плюс модема
Минус литиевого аккумулятора объединён с GND модема и GND конвертера
Для запуска модема вывод BOOT через резистор 4.7 кОм подать на GND

Тем временем, на компьютере запустить программу . Обратить внимание на настройки:
1) Выбрать COM-порт, к которому подключен TTL-конвертер, в моём случае это COM4, у вас может быть другой.
2) Выбрать скорость обмена данными. (Тут есть нюанс, ибо сами модули могут быть настроены под разные скорости, чаще всего 9600 бод или 115200 бод. Здесь нужно подбирать опытным путём, выбрав какую-то скорость, соединившись, и отправив команду АТ, если в ответ приходят крякозябры, то отключится, выбрать другую скорость и повторить команду. И так, пока не придёт в ответ ОК).
3) Выбрать длину пакета (в данном случае 8 бит), бит чётности отключен (none), стоп-бит (1).
4) Обязательно поставить галку +CR , и тогда к каждой посылаемой нами на модуль команде в конце будет автоматически добавляться символ переноса каретки - модуль понимает команды только с этим символом в конце.
5) Соединение, тут всё понятно, нажали и можем работать с модулем.

Если нажать на «Соединение» и после этого запустить модуль, подав BOOT через резистор 4.7К на землю, то сперва в терминале высветится надпись «MODEM:STARTUP», затем, через некоторое время надпись"+PBREADY", означающая, что была прочтена телефонная книга, несмотря на то, что она может быть пустой:
Под этим спойлером АТ-команды с примерами
Печатаем команду AT - в ответ модуль нам присылает нашу команду, поскольку включен режим эха, и OK:
Проверим статус модема командой AT+CPAS - в ответ опять наша команда, +CPAS: 0 и ОК.
0 - означает, что модуль готов к работе, но в зависимости от ситуации могут быть и другие цифры, например 3 – входящий звонок, 4 – в режиме соединения, 5 – спящий режим. По 1 и 2 информации не нашёл.
Изменение скорости передачи данных по UART происходит командой AT+IPR=9600 - это если нужна скорость 9600. Если какая-то другая, аналогично AT+IPR=19200 к примеру или AT+IPR=115200. 
Проверим сигнал сети. AT+CSQ, в ответ приходит +CSQ: 22,1 - значение до запятой имеет диапазон 0… 31 (115… 52дБл) - это уровень сигнала, чем больше, тем лучше. Но 99 означает его отсутствие. Значение после запятой - качество сигнала 0… 7 - здесь уже наоборот, чем число меньше, тем лучше.
Отключим режим эха, отправив команду ATE0, чтобы дублирующие команды не мешались. Обратно этот режим включается командой ATE1.
Посмотреть версию прошивки AT+GETVERS
Эти и многие другие команды можно посмотреть
Совмещение плат
Если Pro Mini припаять к макетной плате труда не составляет, то с GSM-модулем дело обстоит несколько сложнее, т.к. контактная гребёнка у него расположена только лишь с одной стороны и если припаять только её, то другая сторона платы останется просто висеть в воздухе. Тогда, опять же на глаз пришлось сверлить дополнительные 3 отверстия возле трёх углов на плате. Затем области вокруг каждого из отверстий были зачищены от маски. Для удобства, на беспаечную макетную плату (белую) поместил разъединённые выводы от гребёнки и, установив на них плату GSM-модуля нормально запаял:
Позже пришлось делать ещё одно отверстие, в моём случае на букве «I», где написано «Мade In China», с краю платы.
Получилось так, что добавленный контакт, который по сути является GND, стал находится рядом c GND платы Pro Mini, и тем самым появилась возможность объединить землю GSM-модуля и Pro Mini каплей припоя (длинный вывод посередине и справа от него вывод Pro Mini) - стрелочками их отметил. Кривовато конечно вышло, зато надёжно теперь держится:

Между платами осталось некоторое пространство - в него я поместил плату контроля заряда разряда лития с предварительно выпаянным microUSB-разъёмом и припаянными проводами. 
Платка входит туда очень плотно, при этом свечение светодиодов сбоку будет хорошо заметно через небольшое отверстие в корпусе.

Стойки для платы
Чтобы надёжно закрепить плату внутри корпуса, пришлось потратить пару дней на раздумия, как это можно реализовать. Вариант с термоклеем не рассматривался по нескольким причинам - он может отвалиться, деформироваться и самое главное - конструкция получилась бы трудно разбираемой.Пришёл к мысли, что самым простым и правильным вариантом здесь будет применить стойки, которых естественно у меня не было. Однако было пару нерабочих зарядников, откуда было выпилено по одной длинной стойке с резьбой под саморезы. Каждая стойка была распилена пополам допилена напильником до примерно 9.5мм - именно при такой высоте расположенный под платой аккумулятор имеет достаточный запас, примерно в 2мм - это сделано для того, чтобы паянные контакты платы своими остриями не касались него и чтобы была возможность вложить между ними кусочек поролона для фиксации.
Что касается прикрепления платы непосредственно к корпусу, то здесь нарезал четыре полоски из банки из-под кофе, на концах которых просверлил по отверстию, затем закрепил их на тех же саморезах, которые вкручены в стойки. Ниже на фото посмотрите, как это выглядит.
Следующий этап - прикрутить пару стоек с другой стороны платы, то есть сверху, чтобы при закрытом корпусе, крышка слегка упиралась в эти стойки, создавая дополнительную фиксацию. Чуть позже, под это дело мне в руки попался корпус из-под советского пропагандистского радио (если бы он нашёлся раньше - все стойки взял бы отсюда), где нашёл парочку более-менее подходящих по высоте, но сперва я их по центру рассверлил дрелью под саморезы. Потом спилил их и также допилил напильником, убрав излишки. Тут у меня вышла одна тонкость - на фото можно заметить, что одна белая стойка прикручена к гетинаксовой плате с краю, а другая белая - непосредственно к плате модуля, т.к. с одного края плата модема полностью закрывает собой плату нижнюю, а с противоположного края - наоборот - выглядывает уже нижняя. При этом в обеих платах пришлось дополнительно рассверливать отверстия, чтобы шляпки саморезов могли свободно пройти.
Ну и наконец, осталось сделать так, чтобы плата всегда была параллельна корпусу - под это дело замечательно подошли скобы, которые применяют для фиксации проводов и кабелей на стене, гвозди из них я предварительно извлёк. Скобы хорошо цепляются к плате вогнутой стороной без каких-либо дополнительных приспособлений, единственное - справа от SIM-карты, ширина скобы оказалась избыточной и пришлось её также отшлифовать.
Все детали подгонялись на глаз и опытным путём, ниже фото всего вышесказанного:


Разъёмы. Светодиоды. Кнопка.
Так как гребёнка у меня закончилась, пришлось с платы DVD-привода демонтировать 6-пиновый разъём, который припаял затем к Pro Mini, это для удобства перепрошивки платы. Рядом же припаял круглый разъём (нокиевский 3.5мм) для заряда лития.
Корпус 6-пинового разъёма немного допилил напильником, ибо его края немного выступали над корпусом. Гнездо зарядки идеально плотно упёрлось в стенку корпуса. 
С другой стороны платы припаял кнопку для перезагрузки устройства и два светодиода для отладки прошивки - красный светодиод подключен к GSM-модулю, второй зелёный светодиод к 10-му выводу Pro Mini - по нему мне проще отлаживать программу.
Доработка аккумулятора
Плоский нокиевский аккумулятор от телефонов Nokia не менее распространённый элемент, чем 18650, однако многие попросту отказываются от его использования из-за неудобства подключения контактов, которые на самом аккумуляторе утоплены вглубь. Паять их нежелательно, поэтому решено было воспользоваться способом, предложенным этими , а именно сделать из канцелярского ластика и медной проволоки (толщиной 1.5мм) контактную колодку самому.Сперва проткнул кусочек ластика двумя проволоками с предварительно зачищенными концами, и прикинул к контактам аккумулятора, чтобы расстояние между ними совпадало,
кончики загнул, залудил паяльником, а за длинные концы чуть вытащил назад, чтобы полученные контакты оказались утоплены в ластик.


Примерка на аккумуляторе:
Закрепить контактную колодку можно канцелярской резинкой или замотать синей изолентой, что я и сделал в итоге.
Сборка.
Основная часть работы сделана, осталось всё это собрать и зафиксировать.Между аккумулятором и платой вложил кусочек поролона, чтобы тот не елозил потом внутри корпуса. На питание модуля я дополнительно припаял конденсатор на 2200 мкФ.

При подключенной зарядке:
Корпус. Внешний клеммник.
Корпус заимел на местном радиорынке примерно за 1.5$, если перевести в доллары, размером 95x60x25мм, практически с пачку сигарет. В нём я просверлил несколько отверстий. Сперва для 4-х контактного клеммника, взятого от неработающего диммера.Два крайних контакта я полностью освободил от болтов с прокладками, просверлил отверстия под более длинные болты, на которых весь клеммник и будет держаться на корпусе. На самом же корпусе, понятно дело, два крайних отверстия будут большими, а два посередине поменьше - в них будут продеты контакты, один из которых подключен к VCC Pro Mini, а второй контакт к пину 2.

Сверление отверстий хоть и простое на первый взгляд занятие, но всё же не менее трудоёмкое, очень легко промахнуться, поэтому делал это сначала сверлом меньшего диаметра, потом побольше. 
Для тактовой кнопки я подобрал колпачок со слегка вогнутой вершиной, чтобы через узкое отверстие в корпусе по ней удобно было попасть спичкой или скрепкой.
Плата в корпусе с подключенным шлейфом USB-TTL конвертера:
Про антенну.
Антенна, как вы могли заметить по ходу обзора, постоянно менялась, так как я экспериментировал с разными самодельными антеннами. Изначально на плате модуля присутствовал круглый коаксиальный разъём, но на пятый раз его использования под внешнюю антенну он просто развалился, поэтому имейте ввиду, что он хлипкий. В итоге выдрал из старого роутера антенну на текстолите, её и припаял к плате модуля, т.к. она немного лучше ловит сеть, чем пружинка и проволока.
Ну и совсем в сборе с подключенной зарядкой выглядит так:
Тест. Как это работает:
Помимо тестов с антенками я проверял, как будет себя вести сигнализация на улице, в мороз -15. Для этого я просто поместил внутренности целиком в контейнер и оставлял на балконе на ночь, сигнализация при этом не стартовала, причина оказалась в общем-то очевидна - литий не любит мороз. Это подтвердилось другим тестом, где аккумулятор я оставлял дома, а плату через длинные провода выводил на улицу и оставлял так на сутки в тот же мороз - срабатывание, как ни в чём не бывало. С другой стороны было бы странно, если бы сигнализация не заработала т.к. в даташитах что на атмегу, что на модуль, что на кварц - допустимые температуры работы до -40 градусов.
Принцип работы организован по внешнему прерыванию, изначально пин 2 замкнут на VCC и тем самым на выводе поддерживается логический 1, а контроллер спит. Как только контакт нарушается и на пине 2 появляется 0, микроконтроллер просыпается, опускает 3-й пин (к которому через резистор подключен BOOT модема) к земле - запускается модуль, МК периодически опрашивает модуль на готовность, и как только он поймает сеть, сразу посылает вызов на указанный в коде номер телефона хозяина. После отклонения вызова, девайс отключается, не посылая больше бесконечных вызовов, чем грешат многие китайские сигнализации.
Дополнительная информация
#include
Схема (без платы контроля заряда-разряда)
Выводы и мысли. Планы.
Сигнализация используется на даче, работой удовлетворён, однако с дальнейшим изучением AVR, приходит всё больше идей для дальнейшей ей модификации. Ардуино с его лже-языком Wiring меня сильно расстроила, т.к. обнаружился один неприятный момент в работе. Когда я использовал функции для работы с портами digitalWrite(); или pinMode(); - то GSM-модуль почему-то очень часто зависал. Но стоило заменить их на выкрутасы вроде DDRB|=(1<По энергосбережению...
Собранный девайс отработал четыре полных месяца без подзарядки и продолжает работать, хотя правильнее сказать «спать». Проверяется это простой перезагрузкой через белую кнопку. При энергопотреблении 250 мкА (через стабилизатор LE33) и аккумуляторе ~1430 mAh, хотя ладно, ввиду неновизны аккумулятора округлим до 1000mAh, получается, что девайс может отсыпаться около 5.5 месяцев без подзарядки. Если всё-таки выпаять стабилизатор, то время работы можно смело умножить в 10 раз. Но в моём случае в этом нет нужды, т.к всё равно нужно раз в три месяца тратить баланс с симки, заодно и девайс можно проверить и подзарядить.
Приведённый в обзоре пример энергосбережения - далеко не предел, т.к. судя по информации из даташита, можно понизить тактовую частоту микроконтроллера (а делается это установкой фьюзов) до 1МГц и, если подать 1.8В напряжения, то потребление опустится ниже планки 1мкА в активном режиме. Весьма недурно! Но если МК при этом будет тактироваться от внутреннего RC-генератора, то появится другая проблема - эфир UART окажется засорен мусором и ошибками, особенно если контроллер нагреть или охладить.
По доработке...
1)
Обычная проволока, установленная на разрыв не совсем удобна, планирую поэкспериментировать с датчиком Холла и герконом, хотя про последний говорят, что не шибко надёжен, ибо контакты внутри него могут залипнуть.
2)
Неплохо было бы добавить возможность смены «номера хозяина» без участия компьютера и перепрошивки. Это уже с EEPROM придётся поработать.
3)
Попробовать прерывания от сторожевого таймера, но не просто любопытства ради, а чтобы микроконтроллер периодически просыпался сам, делал замеры напряжения аккумулятора и отправлял полученное значение по SMS, чтобы быть в курсе насколько аккумулятор разряжен.
4)
Солнечная панель может и вовсе избавить от необходимости подзаряжать девайс, это будет актуально особенно для малоёмких аккумуляторов.
5)
Ещё давно хотел прикупить LiFePo4 аккумуляторы, которые по отзывам нормально переносят мороз, да вот пока искал годный лот, весна уже незаметно наступила.
6)
Поработать над эстетической составляющей
Какую Pro Mini купить?
Если фена нет, то Pro Mini «RobotDyn» Atmega168PA 3.3V, чем-то острым сковыриваете светодиод и имеете ~250мкА.
Если есть фен, то любую плату, выпаиваете стабилизатор и светодиод по питанию - получаете ~20мкА потребления тока.
На этом пока всё, надеюсь, обзор был интересен и полезен.
Планирую купить +174 Добавить в избранное Обзор понравился +143 +278Всем привет, сегодня мы рассмотрим устройство под названием датчик движения. Многие из нас слышали об этой штуке, кто то даже имел дело с этим устройством. Что же такое датчик движения? Попробуем разобраться, итак:
Датчик движения, или датчик перемещения - устройство (прибор) обнаруживающий перемещение каких либо объектов. Очень часто эти устройства, используются в системах охраны, сигнализации и мониторинга. Форм факторов этих датчиков существует великое множество, но мы рассмотрим именно модуль датчика движения для подключения к платам Arduino, и именно от фирмы RobotDyn. Почему именно этой фирмы? Я не хочу заниматься рекламой этого магазина и его продукции, но именно продукция данного магазина была выбрана в качестве лабораторных образцов благодаря качественной подаче своих изделий для конечного потребителя. Итак, встречаем - датчик движения (PIR Sensor) от фирмы RobotDyn:


Эти датчики малы по габаритам, потребляют мало энергии и просты в использовании. Кроме того - датчики движения фирмы RobotDyn имеют еще и маркированные шелкографией контакты, это конечно мелочь, но очень приятная. Ну а тем кто использует такие же датчики, но только других фирм, не стоит беспокоиться - все они имеют одинаковый функционал, и даже если не промаркированы контакты, то цоколёвку таких датчиков легко найти в интернете.
Основные технические характеристики датчика движения(PIR Sensor):
Зона работы датчика: от 3 до 7 метров
Угол слежения: до 110 о
Рабочее напряжение: 4,5...6 Вольт
Потребляемый ток: до 50мкА
Примечание: Стандартный функционал датчика можно расширить, подключив на пины IN и GND датчик освещенности, и тогда датчик движения будет срабатывать только в темноте.
Инициализация устройства.
При включении, датчику требуется почти минута для инициализации. В течение этого периода, датчик может давать ложные сигналы, это следует учесть при программировании микроконтроллера с подключенным к нему датчиком, или в цепях исполнительных устройств, если подключение производится без использования микроконтроллера.
Угол и область обнаружения.
Угол обнаружения(слежения) составляет 110 градусов, диапазон расстояния обнаружения от 3 до 7 метров, иллюстрация ниже показывает всё это:

Регулировка чувствительности(дистанции обнаружения) и временной задержки.
На приведённой ниже таблице показаны основные регулировки датчика движения, слева находится регулятор временной задержки соответственно в левом столбце приведено описание возможных настроек. В правом столбце описание регулировок расстояния обнаружения.

Подключение датчика:
- PIR Sensor - Arduino Nano
- PIR Sensor - Arduino Nano
- PIR Sensor - Arduino Nano
- PIR Sensor - для датчика освещенности
- PIR Sensor - для датчика освещенности
Типичная схема подключения дана на схеме ниже, в нашем случае датчик показан условно с тыльной стороны и подключен к плате Arduino Nano.

Скетч демонстрирующий работу датчика движения(используем программу ):
/* * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano */ void setup() { //Установить соединение с монитором порта Serial.begin(9600); } void loop() { //Считываем пороговое значение с порта А0 //обычно оно выше 500 если есть сигнал if(analogRead(A0) > 500) { //Сигнал с датчика движения Serial.println("Есть движение!!!"); } else { //Нет сигнала Serial.println("Всё тихо..."); } }
Скетч является обычной проверкой работы датчика движения, в нём есть много недостатков, таких как:
- Возможные ложные срабатывания, датчику необходима самоинициализация в течение одной минуты.
- Жесткая привязка к монитору порта, нет выходных исполнительных устройств(реле, сирена, светоиндикация)
- Слишком короткое время сигнала на выходе датчика, при обнаружении движения необходимо программно задержать сигнал на более долгий период времени.
Усложнив схему и расширив функционал датчика, можно избежать вышеописанных недостатков. Для этого потребуется дополнить схему модулем реле и подключить обычную лампу на 220 вольт через данный модуль. Сам же модуль реле будет подключен к пину 3 на плате Arduino Nano. Итак принципиальная схема:

Теперь пришло время немного усовершенствовать скетч, которым проверялся датчик движения. Именно в скетче, будет реализована задержка выключения реле, так как сам датчик движения имеет слишком короткое время сигнала на выходе при срабатывании. Программа реализует 10-ти секундную задержку при срабатывании датчика. При желании это время можно увеличить или уменьшить, изменив значение переменной DelayValue . Ниже представлен скетч и видео работы всей собранной схемы:
/* * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano * Relay Module -> Arduino Nano */ //relout - пин(выходной сигнал) для модуля реле const int relout = 3; //prevMillis - переменная для хранения времени предидущего цикла сканирования программы //interval - временной интервал для отсчета секунд до выключения реле unsigned long prevMillis = 0; int interval = 1000; //DelayValue - период в течение которого реле удерживается во включенном состоянии int DelayValue = 10; //initSecond - Переменная итерации цикла инициализации int initSecond = 60; //countDelayOff - счетчик временных интервалов static int countDelayOff = 0; //trigger - флаг срабатывания датчика движения static bool trigger = false; void setup() { //Стандартная процедура инициализации порта на который подключен модуль реле //ВАЖНО!!! - чтобы модуль реле оставался в первоначально выключенном состоянии //и не срабатывал при инициализации, нужно записать в порт входа/выхода //значение HIGH, это позволит избежать ложных "перещелкиваний", и сохранит //состояние реле таким, каким оно было до включения всей схемы в работу pinMode(relout, OUTPUT); digitalWrite(relout, HIGH); //Здесь всё просто - ждем когда закончатся 60 циклов(переменная initSecond) //продолжительностью в 1 секунду, за это время датчик "самоинициализируется" for(int i = 0; i < initSecond; i ++) { delay(1000); } } void loop() { //Считать значение с аналогового порта А0 //Если значение выше 500 if(analogRead(A0) > 500) { //Установить флаг срабатывания датчика движения if(!trigger) { trigger = true; } } //Пока флаг срабатывания датчика движения установлен while(trigger) { //Выполнять следующие инструкции //Сохранить в переменной currMillis //значение миллисекунд прошедших с момента начала //выполнения программы unsigned long currMillis = millis(); //Сравниваем с предидущим значением миллисекунд //если разница больше заданного интервала, то: if(currMillis - prevMillis > interval) { //Сохранить текущее значение миллисекунд в переменную prevMillis prevMillis = currMillis; //Проверяем счетчик задержки сравнивая его со значением периода //в течение которого реле должно удерживаться во включенном //состоянии if(countDelayOff >= DelayValue) { //Если значение сравнялось, то: //сбросить флаг срабатывания датчика движения trigger = false; //Обнулить счетчик задержки countDelayOff = 0; //Выключить реле digitalWrite(relout, HIGH); //Прервать цикл break; } else { //Если значение всё еще меньше, то //Инкрементировать счетчик задержки на единицу countDelayOff ++; //Удерживать реле во включенном состоянии digitalWrite(relout, LOW); } } } }
В программе присутствует конструкция:
unsigned long prevMillis = 0;
int interval = 1000;
...
unsigned long currMillis = millis();
if(currMillis - prevMillis > interval)
{
prevMillis = currMillis;
....
// Наши операции заключенные в тело конструкции
....
}
Чтобы внести ясность, было решено отдельно прокомментировать эту конструкцию. Итак, данная конструкция позволяет выполнить как бы параллельную задачу в программе. Тело конструкции срабатывает примерно раз в секунду, этому способствует переменная interval . Сначала, переменной currMillis присваивается значение возвращаемое при вызове функции millis() . Функция millis() возвращает количество миллисекунд прошедших с начала программы. Если разница currMillis - prevMillis больше чем значение переменной interval то это означает, что уже прошло более секунды с начала выполнения программы, и нужно сохранить значение переменной currMillis в переменную prevMillis затем выполнить операции заключенные в теле конструкции. Если же разница currMillis - prevMillis меньше чем значение переменной interval , то между циклами сканирования программы еще не прошло секунды, и операции заключенные в теле конструкции пропускаются.
Ну и в завершение статьи видео от автора:
Пожалуйста, включите javascript для работы комментариев.